研究の概要・特徴
多様な作業をロボットで行うために、人の動作に合わせて動く技術や、人の指令とロボットの自律性とが協調する技術の研究を行っています。
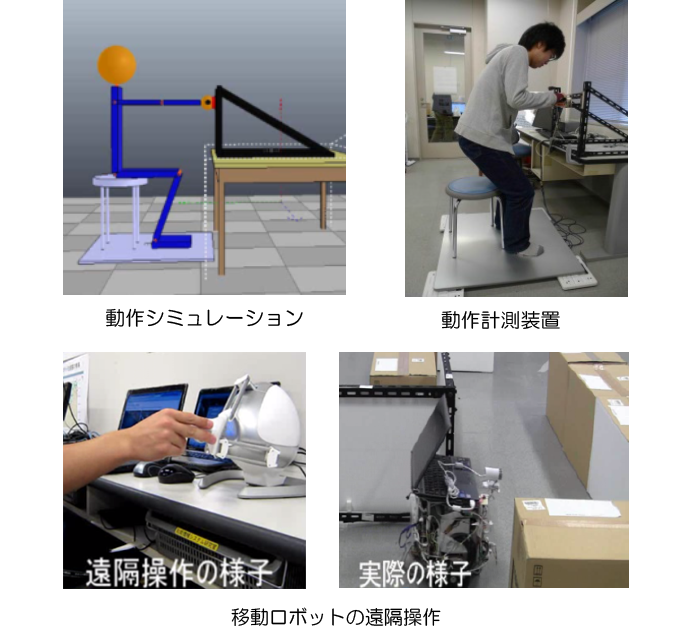
(1)人の動作支援の研究
高齢社会を迎え、立ち座り動作を支援する機器の研究を行なっています。
力覚センサと重心位置センサで人の立ち上がり動作を計測したり、同時に、人をモデル化しシミュレーションを行いながら動作を解明しています。これらから最適な支援機器を開発していきます。
(2)遠隔協調作業の研究
どこからでもロボットの操作ができるように、インターネットを介したロボットの遠隔操作方法の研究を行っています。RSNPという通信プロトコルを利用し、複数のロボットやカメラなどを簡単に組み合せられるシステムを目指しています。これにより、遠隔ロボットでの共同作業が可能になります(画像の更新は秒数枚程度)。
RSNP:ロボットサービスイニシアチブ(RSi)で開発された通信プロトコル